Lec 9: Basic Navigation Concepts II
Today’s Lecture:
Basic Navigation Concepts (“Part II”) - from Locating a Distant Point
Announcements
Comments or Questions?
(General, Lab, Assignment, Readings)
Basic Navigation Concepts II
The Singapore 006 Airlines crash in
Taipei (Taiwan) in November 2000
Apparent Navigation error
Apparent Weather factor (typhoon)
(Relevance of the 2 Geography courses
on Navigation and Weather in the CAMP program?...)
Note also that Box 14.1 “Lost in
theFog” alludes to the hazard of airport ground navigation
Basic Navigation Concepts (“Part II”)
Locating a Distant Point
“What if you want to know the position
of something else (that’s not co-visible, eg. a rock-slide)”?
Done by
use resection to establish your
position
then use intersection to find the
position of something else
Note that
resection is based on backsights or
back bearings, while
intersections are made by foresights
or cross bearings
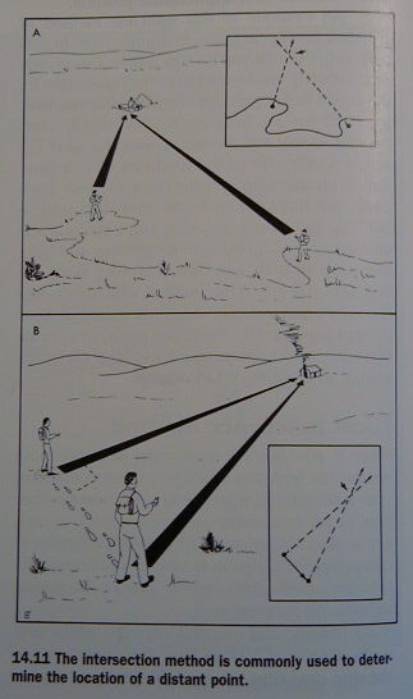
Using the intersection method you
sight on the unknown spot
from two ground positions whose map
positions are known
or can be
computed
the point at which these foresights
intersect establishes the feature’s location
As with resection three points are
better than two
because you get a triangle of error
to locate the distant point (from the
two or three ‘base’ points)
you can use similar techniques to
those discussed for establishing your own position:
inspection
method
compass method
radiobeacon
method
Inspection method
done as before but from two known
positions
Can also be done if there’s only one
known position:
perform the intersection for that
position
then measure distance and direction to
a second position
(and plot this
single-segment base line)
now perform the intersection for that
position
...and if you wish move on to a third
point
note that this method forms the basis
for the important traditional and once-popular
Plane Table
Mapping technique
Fig. 14.11
Compass method
same but with a compass instead of a
sight-rule
Radiobeacon method
navigation is undergoing a revolution
due to:
mobile radio transmitters and GPS
recently along with cell-phones
(What a potent
combination...!)
cf. the technologically advanced (but
economic failure) of the IRIDIUM system
Route-Finding Maps
The next challenge is how to use maps
to get from one location to another
Map user needs to choose the right map
or chart for the task
Land navigation
Water navigation
Air navigation
Land navigation
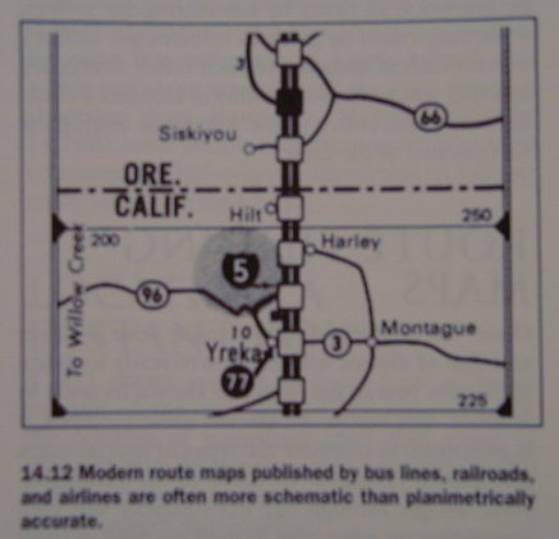
Peutinger tables: schematized (distorted) Roman maps
the tradition lives on, eg. in
Transportation maps
Fig. 14.12
“Strip” Maps, eg. AAA/CAA
Triptik maps
Fig 14.13 *** Triptik Image ***
Standard Road Atlas and Road Maps
***
Example: New York State ***
Modern Road Atlas
*** California Road Atlas (3 images)
***
The text recommends USGS Topo Quads at
the various scales:
DOQ,
1:24 000, 1:62 500
1:100 000, 1:250 000
1: 500 000, 1: 1000 000 (State map scales)
Heuristic: Always choose a larger-scale map, within reason
Water navigation
Nautical charts, Hydrographic charts
Q:
What’s so special about them?
Importance of special symbols
and the date of the chart
Air navigation
Aeronautical charts
Specially selected base map themes
and magenta-colored overlay of
aeronautical information
Example Images:
Aeronautical Chart
Sectional Chart Legend
Digital Aeronautical Charts
Upload to GPS
The date of the chart is usually given
in large red-type in the lower right margin
Route-Finding Techniques
aka Navigation
Moving effectively
through the environment
with the help of maps/charts and other
aids
Several methods:
Piloting
finding your way
by making direct reference to your surroundings
Dead Reckoning
you use distance
and direction logs, paying no direct attention to environmental features
In practice:
many variations of each
that serve to
blur a clear-cut distinction
and in effect,
lead to a plethora of hybrid methods
Navigation involves two
stages/activities
plan the route
including
alternate routes!
execute the route
maintaining your
route in the field
Question: What’s a possible third activity?
A:
Debriefing
a “post mortem” of the navigation
exercise
Planning and executing navigation
using the two main methods
Piloting
based on the use of environmental cues
Planning for piloting
use navigational marks (landmarks,
skymarks, seamarks)
must be co-identifiable in reality and
on the map
vision, sound
smell, tactual (eg. marsh, bog, wetland)
Computer aids to piloting planning
Route-finding software
(also discussed
in Ch. 9: Software for Map Retrieval)
Traditional Piloting Planning
A distinction is made between
different types of areas:
wilderness
rural
urban
Use of aids
buoys, beacons
radio transmitters, satellites act as
supplements, e.g. to contact flying
planning involves
thinking/reflecting over the route
and especially clarifying obscure
segments
tip:
follow a well-defined path
the metaphor of a “hand-rail”
e.g. flying
along a road
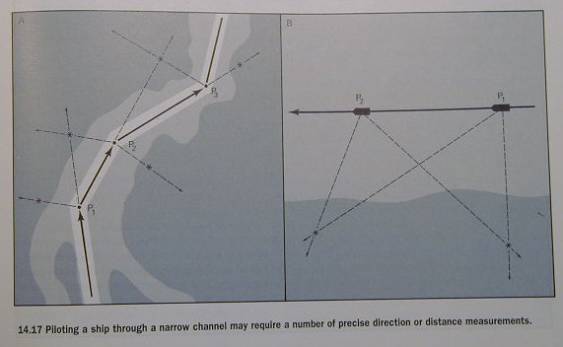
pre-trip planning may also involve
making computations and plotting a
course in tricky areas
and taking the information
(preferrably in the form of marked map) along
An example is shown in Fig. 14.17
Piloting a Course
Driving a car in town is piloting
and often we are unaware of the fact
we are piloting
however, sometimes a familiar setting
can become functionally unfamiliar (fog, snow,darkness)
If visibility is (near) zero - don’t
move!
Vehicle piloting systems
for when you are moving through less
or unfamiliar territory
use Electronic Positioning systems as
aids
modern development: moving map displays
where electronic
positioning devices update the position of a cursor on the map
Electronic positioning systems
Inertial navigation systems
drawback -
accumulates error
Signal dependent systems (eg.
radionavigation, GPS)
advantage: do
not accumulate error
GPS is becoming ubiquitous:
“I am the pilot of my garbage truck”
GPS w/out GIS is
used extensively by vehicle fleets
such as recycling companies
there is a wide
array of trip planning and routing products on the marketplace
Traditional Piloting Procedures
Personalize your map (eg. with
highlighters, pencil)
Use your map constantly to track your
progress
frequent map
checks or orientation stops
Beware of mental maps of
direction-givers
When there are few or no environmental
cues
an alternative to piloting is needed
Dead Reckoning
Based on keeping track of distance and
direction traveled from the starting point
“To determine your position, you must
know
either the
direction and distance you’ve travelled,
or the
direction, speed and time that has elapsed since you have started out”
Errors will accumulate
dead recknoning is not as accurate as
piloting
therefore done as a last resort
or to augment
piloting
Planning for dead reckoning
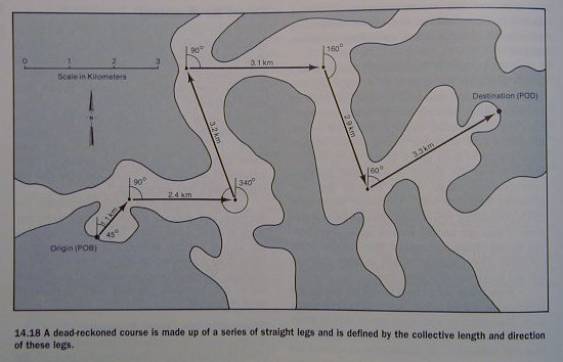
Step 1
construct a plot of the desired course
made up of a
series of segments or “legs”
from the POB
(point of beginning) to the POD (point of destination)
Fig. 4.18
Step 2
measure and record the direction and
distances of each segment
in a manner suitable and convenient
for use in field conditions
to preempt the necesity to do
conversions in the field
eg. use absolute direction readings,
such as Grid North
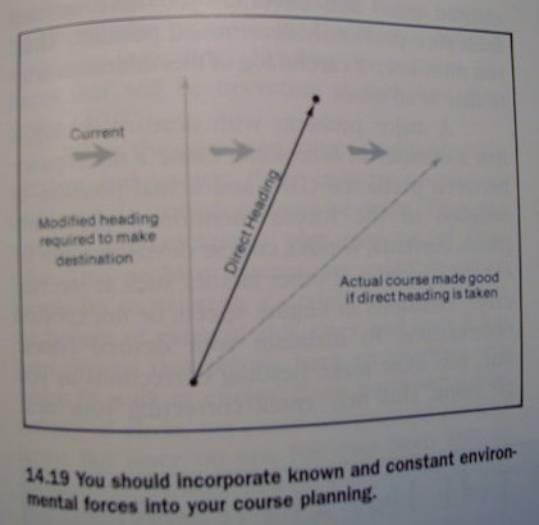
incorporate known and constant forces
as modifications (eg. wind)
Fig 14.19
Time is an important aspect of dead
reckoning
it is advisable to use travel-speed
and course length
to compute
estimated passage (or transit) time (Table 14.3)
and ETA or ETD
(estimated time of departure)
Executing a dead-reckoned course
Consists of of taking and recording
distance and direction data
plotting it down
and comparing it
to the planned course
This applies whether it’s a strictly
manual procedure
or if automatic dead reckoning
equipment is used
Inertial navigation equipment is
heavily used
but not always fool-proof
cf.
Box 14.3: KAL flight 007 from
Anchorage to Seul.
Manual dead reckoning procedures
performed in the field based on
direction and distance,
where distance
is measured by (speed x elapsed time)
must be
carefully logged
discrepancies will occur between
planned DR position and actual position
and corrections must be constantly
made
a closed traverse is used to practise
dead reckoning
Fig. 14.20
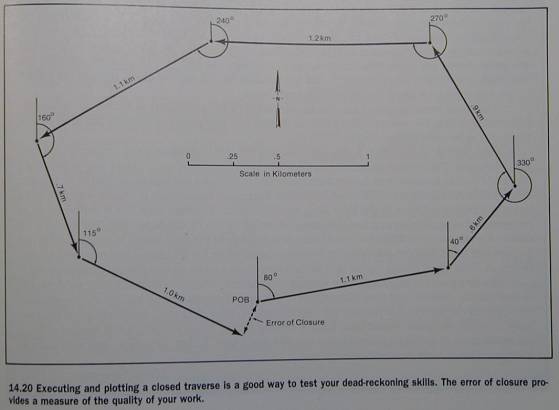
the gap between planned destination
and actual destination
is known as closing error (or error of
closure)
in practise a mix of dead reckoning
and piloting is used
Practical Navigation
the navigator’s rule is “anything
goes”:
use all methods you can to get there
from here...
mix methods of navigation
and switch between methods as the
need/opportunity arises
‘til next week!